Week 27
This is finally the first week that I could work full time on GSoC. Started this week with reviewing a PR for the first time. Furthermore I mostly focused this week on documentation. You already saw the draft of the four bar linkage example last week. During which I ran into various other things. First of the amazing dark theme available in the SymPy dev documentation causes some images to be barely readable (raised #23706). Another thing I already new I wanted to do is that there should be a real guide on the Joints Framework. So I made a draft PR about implementing a real guide on the Joints Framework in the physics/mechanics module (checkout the image below for a quick preview). Yesterday, I presented this to my mentors and got positive feedback. We also had a discussion about consistency within the code which raised this issue. Also the planning is to have either next week or after my holiday a discussion about what we actually have within the Mechanics module and what we actually want.
Issues and PRs I’m working on:
- The PR I’m reviewing
- PR, which adds a four bar linkage example using the joints framework.
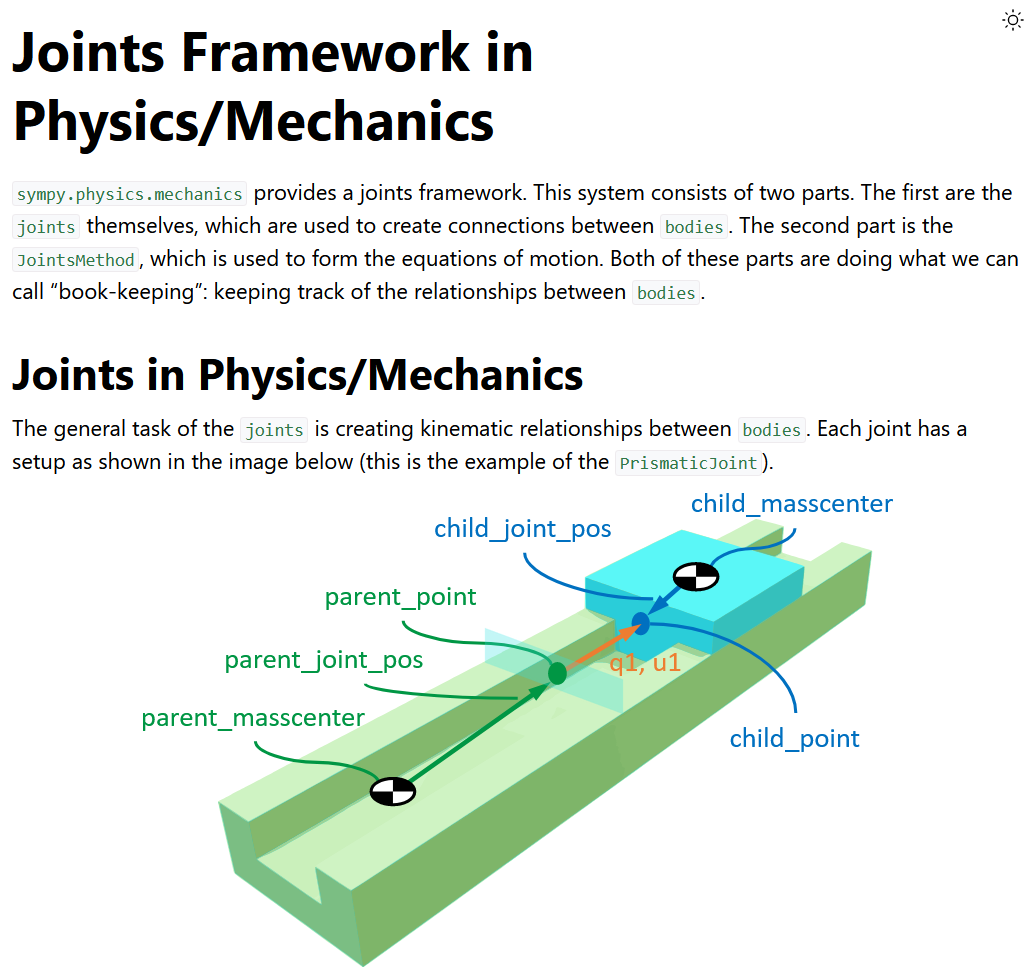
- This issue about creating a figure to explain the joint parameters is being solved in this PR
- The PR, which would reduce
Point.accdependency on computed velocities. - Raised issue about the inconsistency in storing velocity and acceleration data in the
Pointclass.
Some other opened issues an PRs, which I have open, but am not currently working on:
- Issue about image readability in the new dark theme.
- Issue about using a recursive calculation of the velocity in the
Point.velmethod - Draft PR which adds a check on the velocity and acceleration theories as mentioned in the old PR
- Needs a decision as mentioned in this comment
Leave a Comment